Industrial Robot Controller with Teach Pendant
This industrial robot controller optimizes acceleration and deceleration based on the robot's load. It monitors motion and load, optimizing service requirements through its built-in system information system.
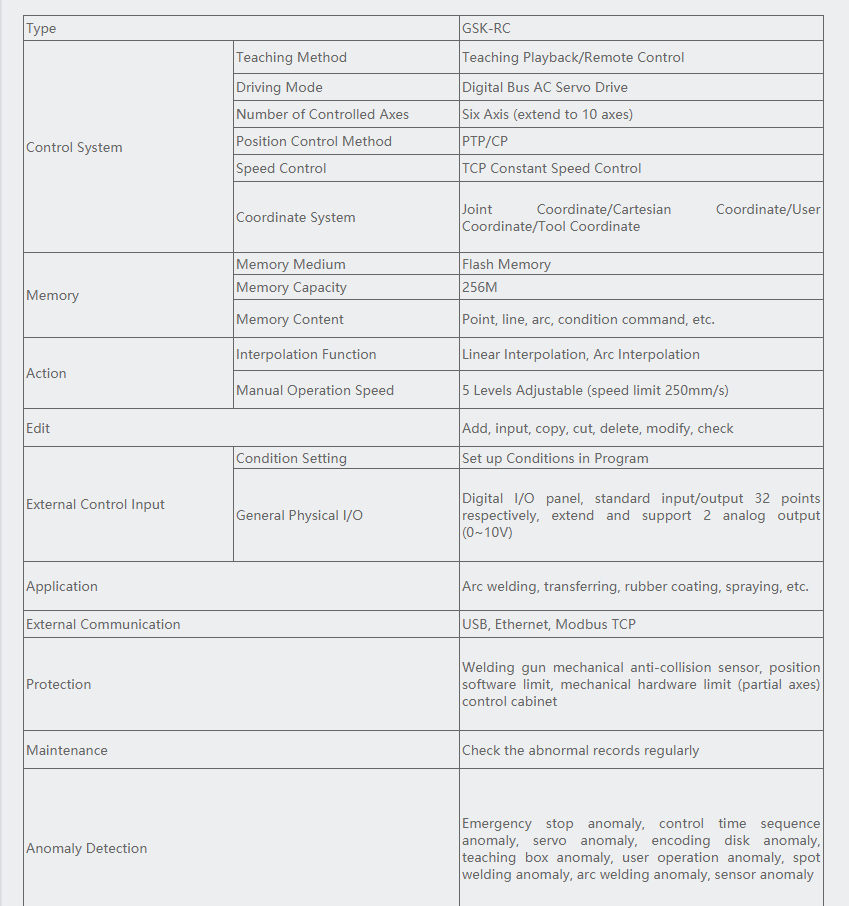
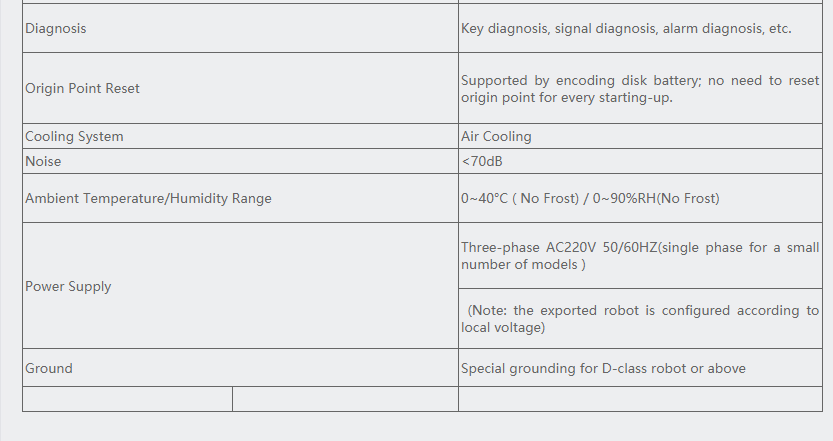
Technical Specifications
Overview
Industrial Robot Control System
This advanced industrial robot controller features a high-performance hardware structure based on ARM, DSP, and FPGA, designed to optimize robot operation and load management. It supports complex motion control with high-speed on-site bus communication and dynamic self-adaption identification to minimize interference. The system includes a comprehensive teaching pendant interface, making it an ideal solution for industrial automation tasks such as arc welding, material transfer, and spraying.
Performance & Control
Supported Coordinate Systems
- Joint
- Cartesian
- User
- Tool
- Control Architecture
- ARM+DSP+FPGA hardware structure
- Arithmetic Speed
- 500 MIPS
- Controlled Axes
- 6 axes (expandable to 10)
- Interpolation Functions
- Linear InterpolationArc Interpolation
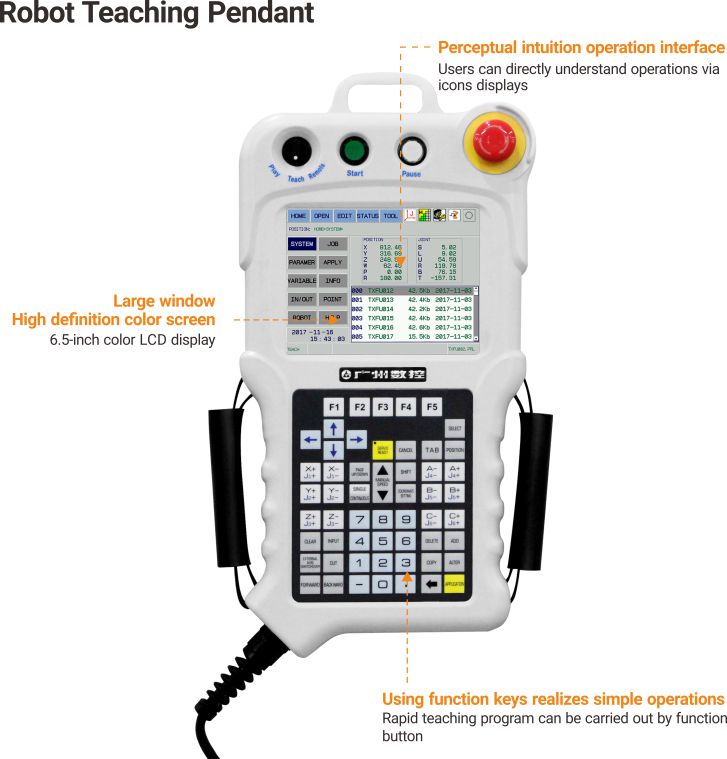
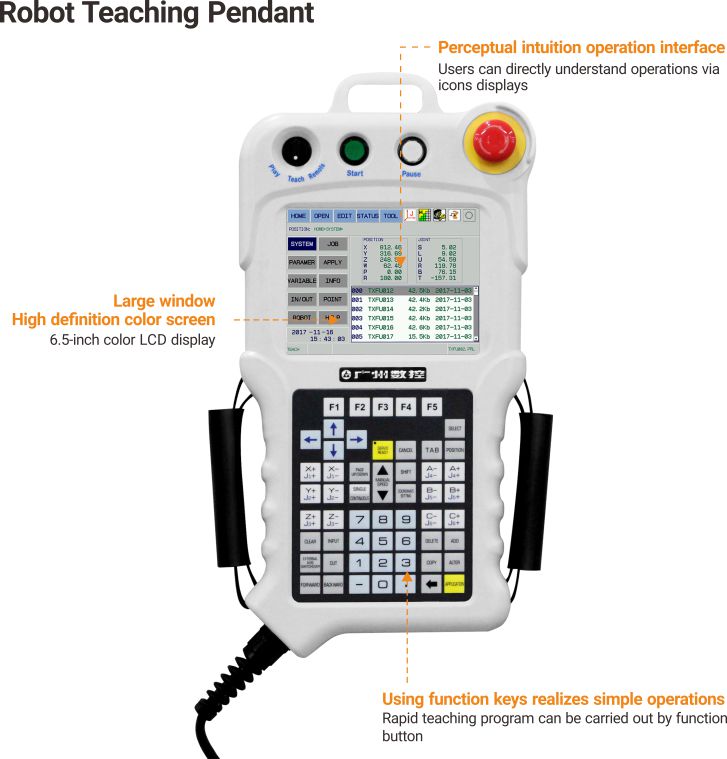
Interface & Programming
- Teaching Pendant Display
- 6.5-inch color LCD
- Memory Capacity
- 256M (Flash Memory)
- Manual Speed Limit
- 250 mm/s
Connectivity & I/O
- External Communication
- EthernetRS232RS485CANDeviceNetUSBModbus TCP
- Digital I/O
- 32 standard input/output points, expandable with 2 analog outputs (0-10V)
Operational Environment
Operating Conditions
| Parameter | Range |
|---|---|
| Ambient Temperature | 0~40°C |
| Humidity | 0~90% RH |
- Noise Level
- 70 dB
Application Areas
Typical Applications
Arc WeldingTransferringRubber CoatingSpraying