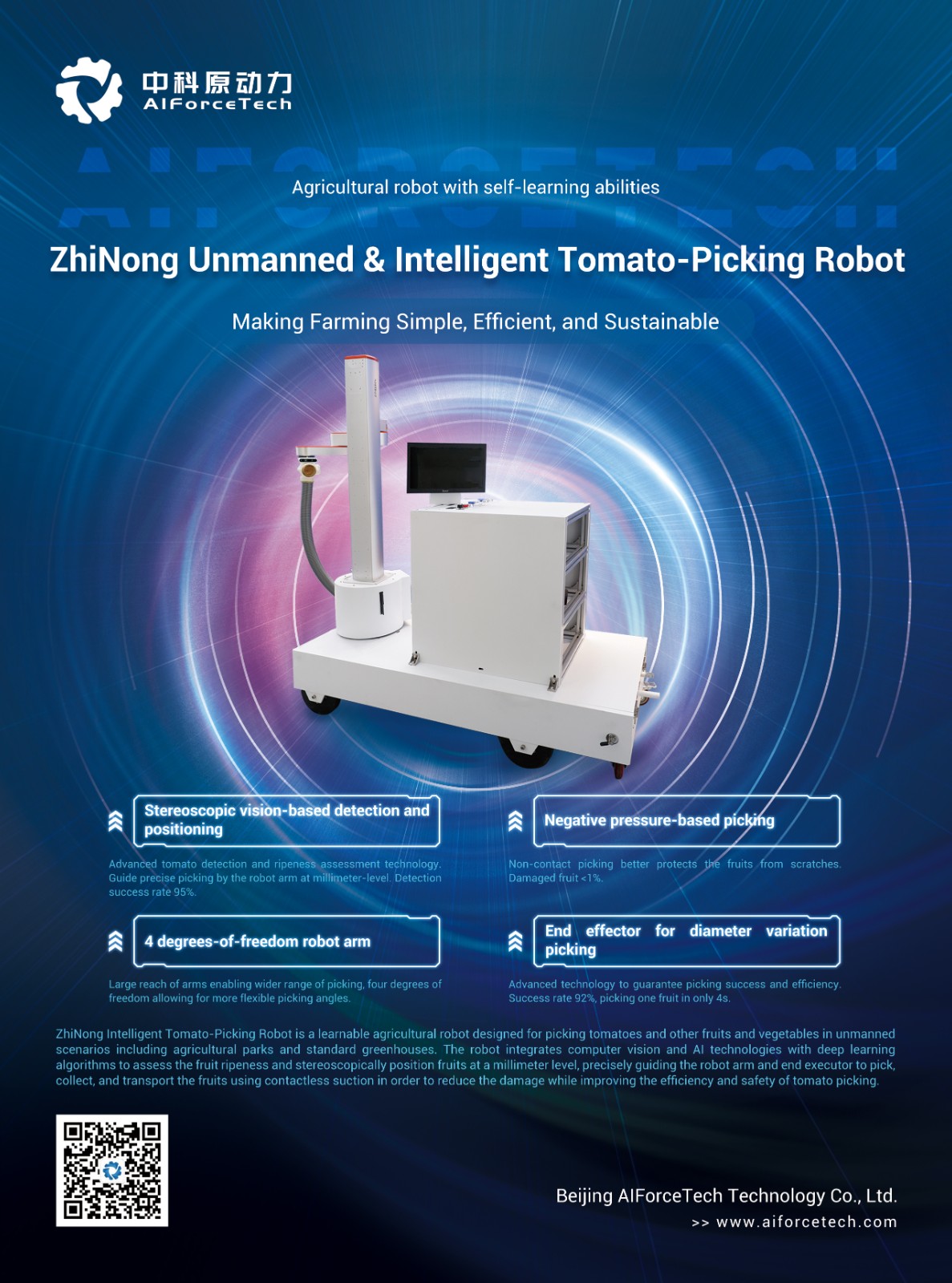
Automated Tomato Harvesting Robot
This robot uses stereoscopic vision and AI to detect and assess tomato ripeness. Its 4-degrees-of-freedom robot arm and negative pressure picking system enable efficient harvesting with minimal damage.
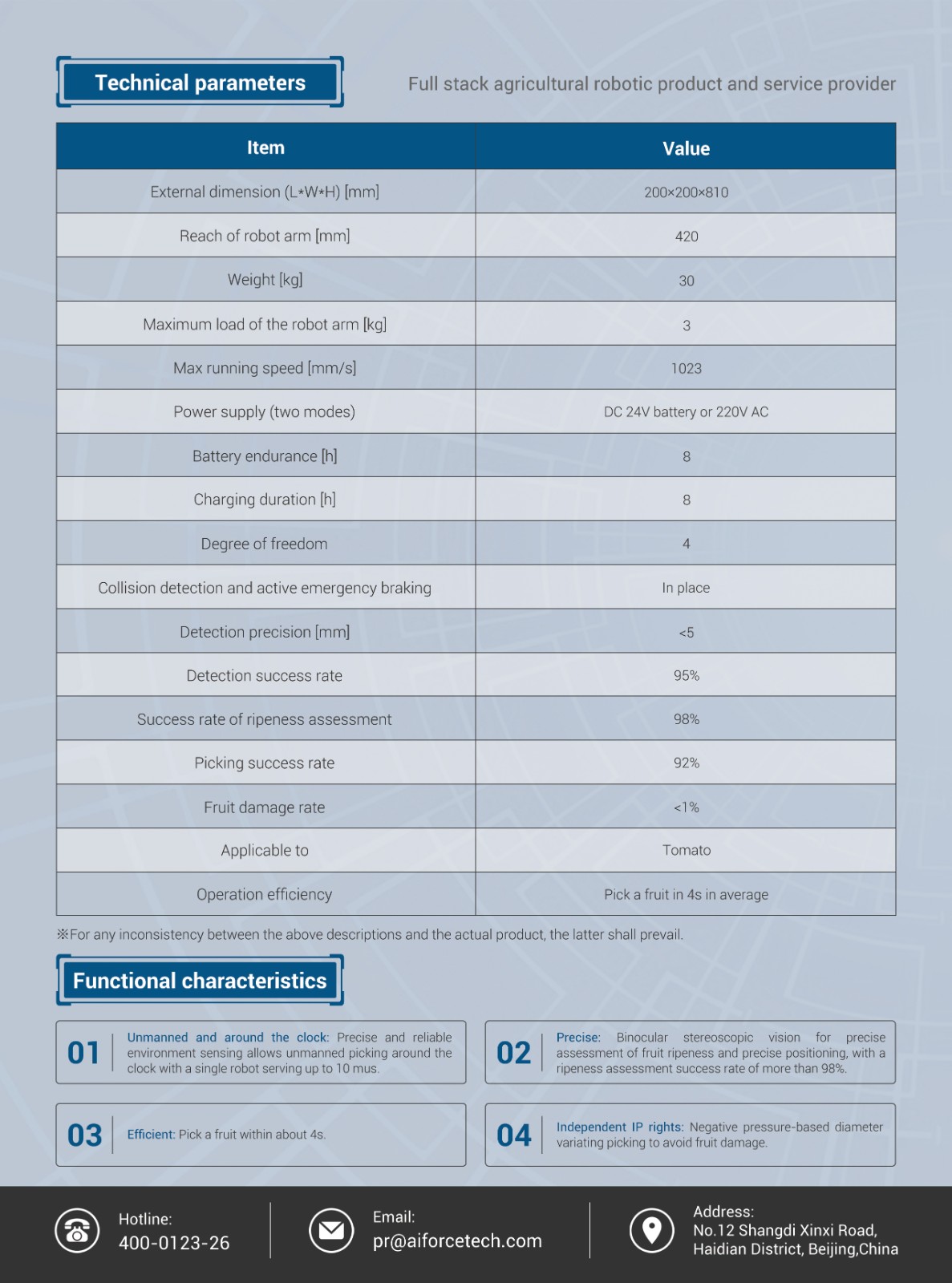
Technical Specifications
Product Overview
Autonomous Agricultural Solution
This advanced robotic system is designed for automated fruit harvesting in unmanned environments such as agricultural parks and professional greenhouses. It integrates high-precision computer vision and deep learning algorithms to accurately assess ripeness and perform non-contact picking. By utilizing negative pressure suction technology, the robot ensures efficient, high-speed harvesting while minimizing potential damage to the crops.
Key Performance Metrics
Core Metrics
95 %
Detection Success
98 %
Ripeness Accuracy
92 %
Picking Success
4 s/fruit
Picking Speed
Technical Specifications
Dimensions & Weight
| Property | Value |
|---|---|
| Dimensions (L*W*H) | 200 x 200 x 810 mm |
| Weight | 30 kg |
| Arm Reach | 420 mm |
| Maximum Load | 3 kg |
Operational Parameters
- Max running speed: 1023 mm/s
- Degrees of freedom: 4
- Detection precision: < 5 mm
- Fruit damage rate: < 1%
Power & Safety
Safety Systems
Collision DetectionActive Emergency Braking
- Power Requirements
- DC 24V Battery220V AC



